Tout d'abord, la machine. Le principe de cette game jam est de développer un jeu pour une machine qui n'a pas eu une grande ludothèque.
Avec le Matra Alice, la question se posait. En effet, la première machine de la gamme, le Matra Alice 4k, est la même machine que le Tandy MC-10,
qui a lui une ludothèque un peu plus fournie.
L'idée était donc de se concentrer plutôt sur les deux autres machines de la gamme commerciale : le Matra Alice 32 et le Matra Alice 90.
Ces machines, qui offrent une compatibilité au niveau BASIC avec la première, sont néanmoins différentes, en particulier à cause d'un
processeur graphique différent. Dans ces deux machines, il s'agit de l'EF9345. Le même qui équipe le VG5000µ, avec la …
La machine de la nouvelle session du « Retro Programmers United for Obscure Systems » est connue. C'est le Matra Alice. Et plus exactement les version 32 et 90, afin de s'échapper de la trop grande proximité entre le Alice premier du nom et le Tandy MC-10 (une telle proximité que ce sont les mêmes machines).
Les versions 32 et 90 étant très similaires niveau hardware, je les nommerais conjointement Alice 32/90.
Pour cet article, ce qui va m'intéresser est que l'Alice 32/90 utilise un EF9345, comme le VG5000. Et l'EF9345 étant aussi utilisé dans le VG5000µ, c'est une puce que je connais bien. Cependant, l'Alice 32/90 l'utilise différemment. Je dirais même qu'il l'utilise mieux.
L'autre axe de cet article est que je veux utiliser l'EF9345 depuis le BASIC. La machine tournant avec un 6803, les I/O sont mappées en mémoire. Et il est donc possible d'accéder aux …
Comme présenté dans un article précédent, j'ai participé à la game jam Retro Programmers United for Obscure Systems, organisée par Olipix. Le principe est de développer un jeu pour une machine qui n'a pas eu une grande ludothèque (moins de 100 titres).
Après avoir terminé ma contribution sur le Lynx, je me suis dit qu'un portage pour l'AgonLight serait intéressant et plutôt facile. Les capacités graphiques sont bien supérieures, et le processeur est un Z80, supporté par la même toolchain que j’avais utilisée pour le Lynx (z88dk).
J'en ai profité pour ajouter une version en anglais et une version en esperanto. Puisque tout est développé depuis les mêmes sources, ces versions sont aussi disponibles sur le Lynx.
Au passage, la taille de l'exécutable a été un tout petit peu réduite. Pas assez pour entrer …
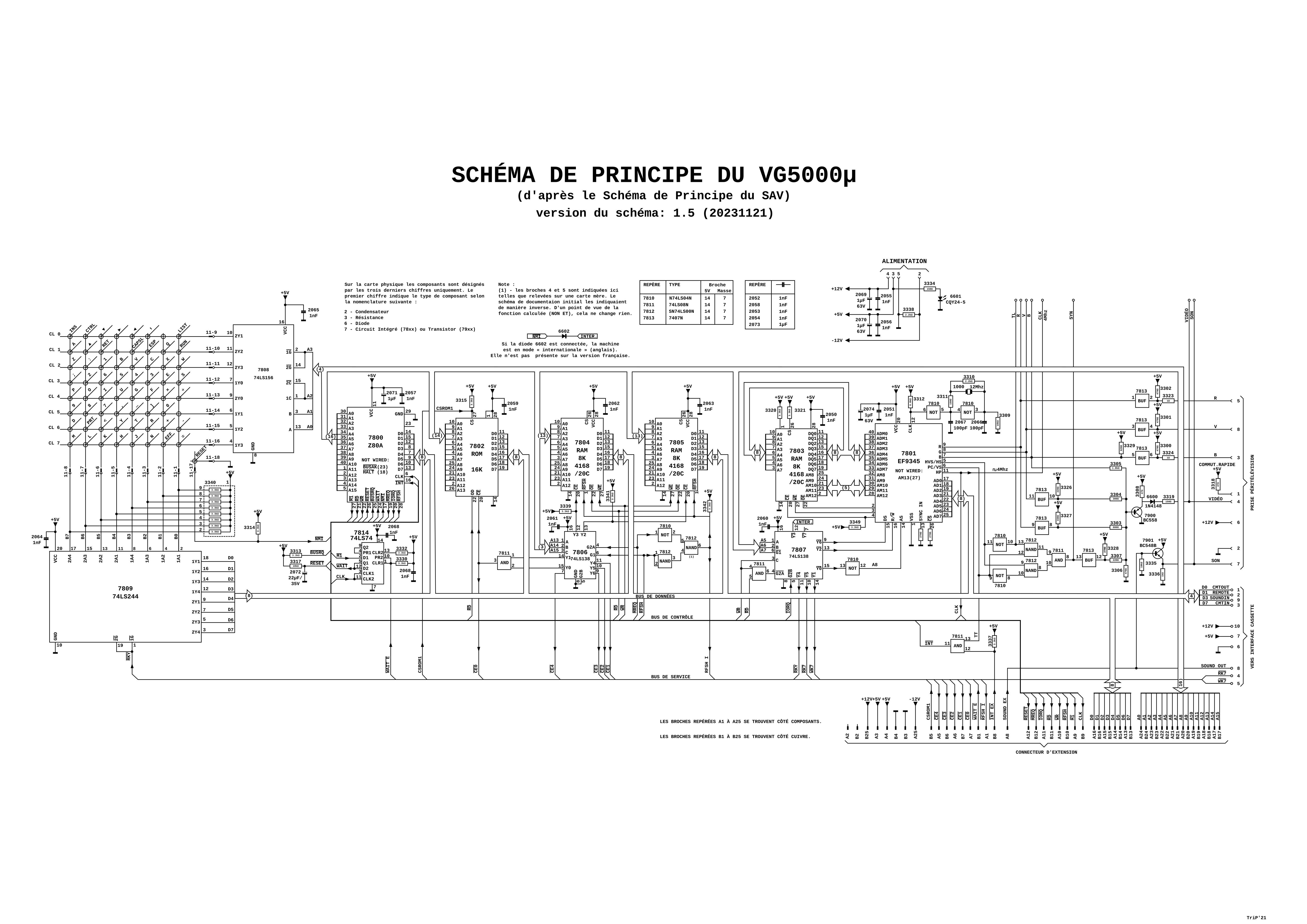
Et voici une nouvelle mise à jour du schéma de principe.
Il y a une seule modification par rapport à la version 1.4, qui est l'ajout du mode international lorsque la diode 6602 relie le signal NMI/ au Y3/ de 7807. Avec cette diode présente, le VG5000µ passe en anglais.
Merci à Etno pour cette information.
Ce qui donne, mis à jour.
La platine principale
Image cliquable pour une version en haute définition. (mise à jour 21 novembre 2023)
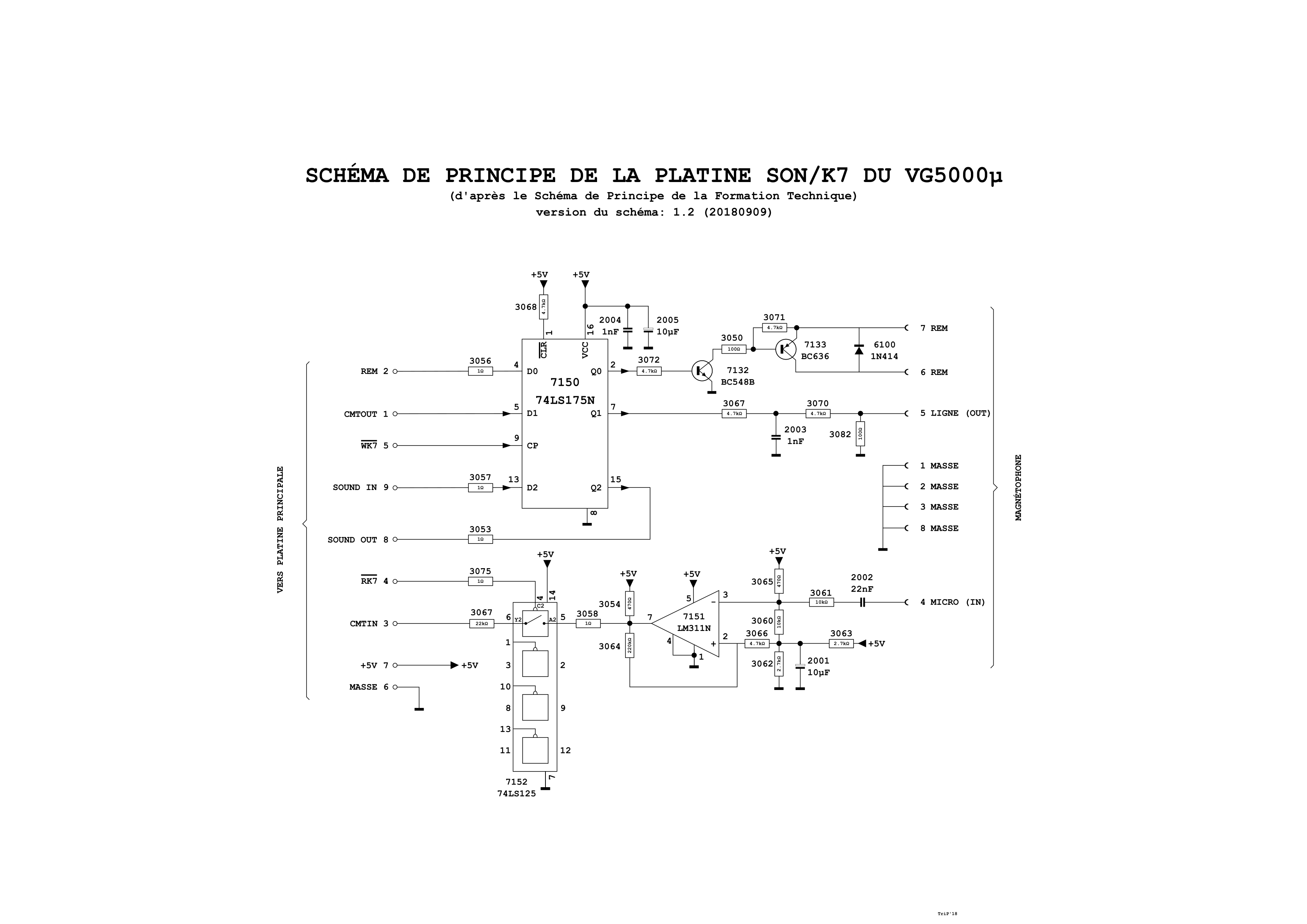
La platine K7/Son
Image cliquable pour une version en haute définition. (mise à jour 9 sept. 2018)