Le 8 avril 2017, un message sur le forum system-cfg posait la question de l'existence d'un commentaire extensif de la ROM du VG5000µ. J'y répondais que j'avais quelques notes.
Depuis, sur ce site, j'ai décortiqué un certain nombre de parties, par curiosité personnelle, ou pour répondre à des questions qui se posaient sur le même forum. Au fur et à mesure, je me suis embarqué dans le commentaire exhaustif de la ROM.
Le commentaire
Ce fut long, plutôt long.
Et je publie le résultat aujourd'hui. Ce résultat prend la forme principale de deux fichiers de commentaires, l'un pour la ROM 1.0 et l'autre pour la ROM 1.1. Le tout est disponible ici sur GitHub.
Ce que je ne publie pas aujourd'hui est l'outil qui permet de prend la ROM d'un côté, le fichier de commentaires de l'autre et qui génère un listing assembleur commenté qui peut-être assemblé à …
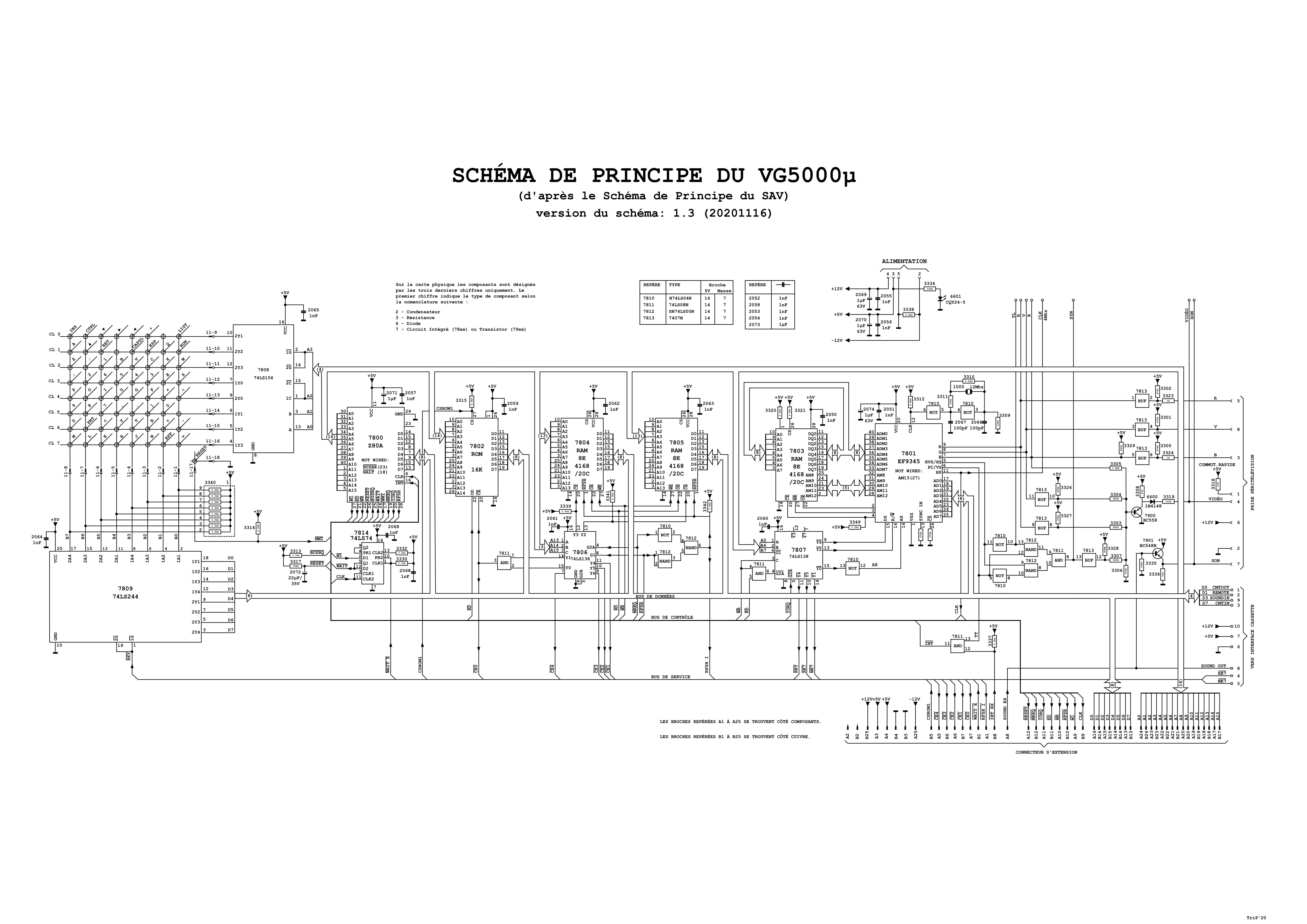
Il y a deux ans, je publiais ici une remise au propre du schéma de principe de la documentation du VG5000µ.
Alors que je finalise le commentaire de la ROM, je me suis aperçu qu'il y avait une erreur au niveau du décodage des entrées sorties. C'est à présent corrigé (ainsi que sur l'article original).
Au niveau de 7807, j'avais inversé les entrées \RD et \WR, ce qui n'avait pas de sens pour l'entrée C du 74LS138.
J'en ai profité pour améliorer la nomenclature des signaux au niveau de ce même composant, en cohérence avec le datasheet.
La platine principale
Image cliquable pour une version en haute définition. (mise à jour 17 nov. 2020)
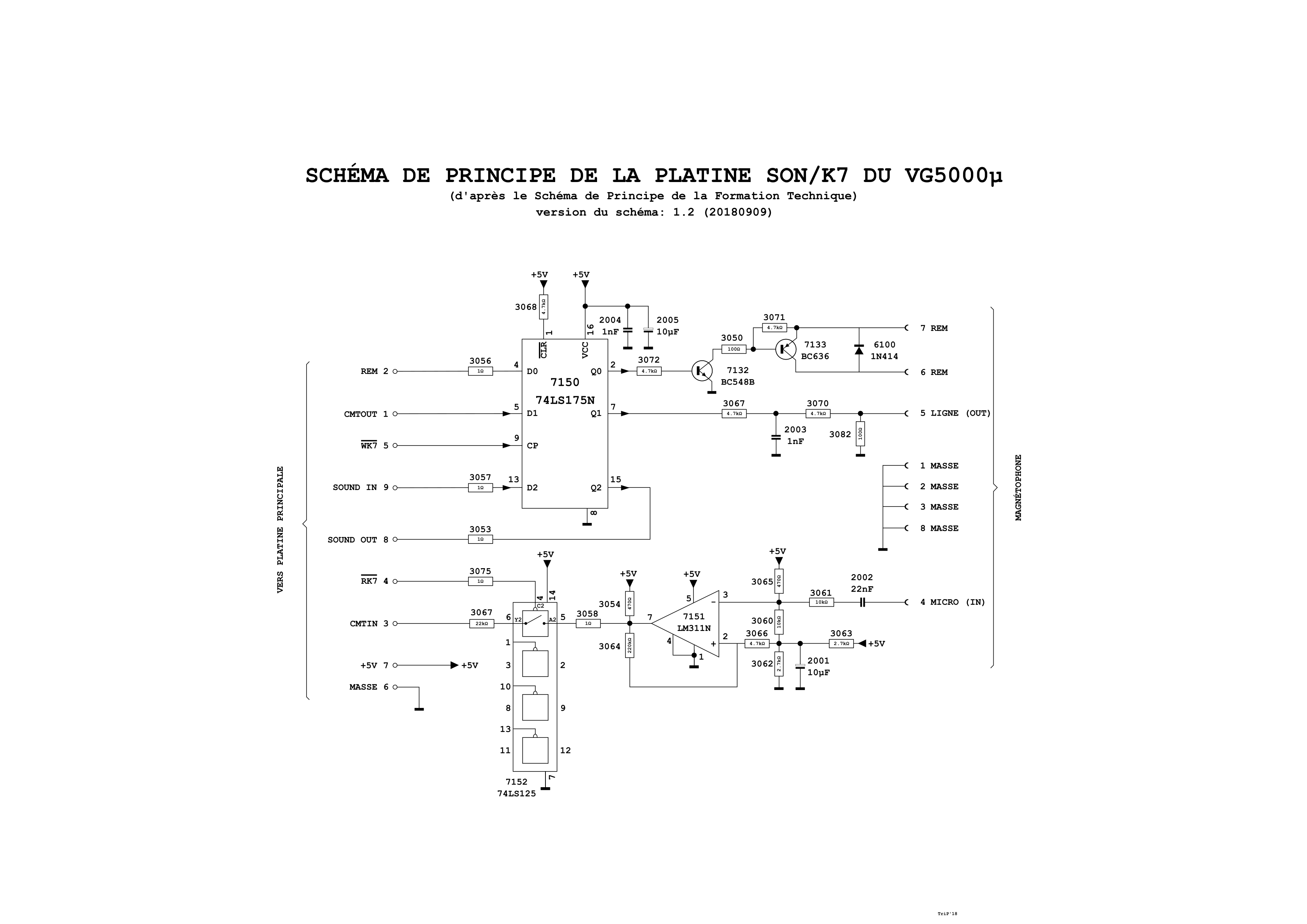
La platine K7/Son
Image cliquable pour une version en haute définition. (mise à jour 9 sept. 2018)
Lors du commentaire systématique de la ROM du VG5000µ, je suis arrivé sur les routines de lecture et écriture sur cassette. Comme d'habitude, afin de vérifier le fonctionnement de la machine, je fais des tests. Si je fais parfois des tests sur le matériel réel, la plupart du temps, un test sur émulateur suffit, voire est beaucoup plus simple, permettant de dérouler une routine et la suivre avec des données bien choisies.
J'utilise essentiellement MAME pour cela, qui est muni d'un debuggeur qui répond à mes attentes. J'utilise parfois dcvg5k, qui est plus orienté sur une utilisation de la machine simple et pratique.
Cependant, pour la cassette, aucun des deux ne convenait. Les deux émulateurs ne savent lire que le format K7, qui a le mérite d'être extrêmement simple et facilement lisible, mais qui a l'inconvénient d'être inadéquat au bon déroulement des routines de lecture et d'écriture.
Hier, en continuant le commentaire systématique de la ROM du VG5000µ, j'ai eu une impression de déjà-vu. Il me semblait bien avoir déjà commenté la partie « redéfinir un caractère étendu » (commandes SETE et SETG en BASIC).
L'impression persiste, voire s’accroît, au fur et à mesure et je me décide à aller voir dans ce que j'ai déjà commenté. J'ai commencé, lentement, ce commentaire en août 2017, avec moult pauses, mais aussi du « butinage ». Il y a donc des parties que je ne me rappelle plus avoir déjà traitées.
Et effectivement, un peu plus loin, je vois des commentaires similaires à ceux que je suis en train d'écrire. Les termes sont un peu différents, car au fil des commentaires, j'ai fait évoluer certains termes ou la manière de commenter, mais en regardant de plus près, oui, c'est évident, il y a deux fois la même routine dans la ROM.
Quand je vois passer des mentions du langage LOGO, elles sont généralement peu flatteuses. C'est compréhensible, la plupart des personnes qui se souviennent de ce langage de programmation y ont été exposées pendant leurs jeunes années d'études, lors du Plan Informatique pour Tous. Peu sont ceux qui ont creusé plus tard ce qu'ils avaient découverts au moyen d'ordinateurs poussifs et de cours pas toujours maîtrisés par des enseignants pas toujours bien convaincus.
Mes quelques souvenirs de séances en salle informatiques sont plutôt sur des activités de manipulation du crayon optique sur « Colorpaint ». Je ne sais plus si j'ai fait du LOGO en classe, mais c'est probable. Je me souviens cependant avec netteté la rencontre avec un professeur, lors de la fréquentation d'un « club informatique » pendant des vacances, qui pour une raison ou une autre (mon intérêt enthousiaste à la programmation ?) m'a donné quelques cours de LOGO. Et lors d'une conversation …